
-
Edge Detection
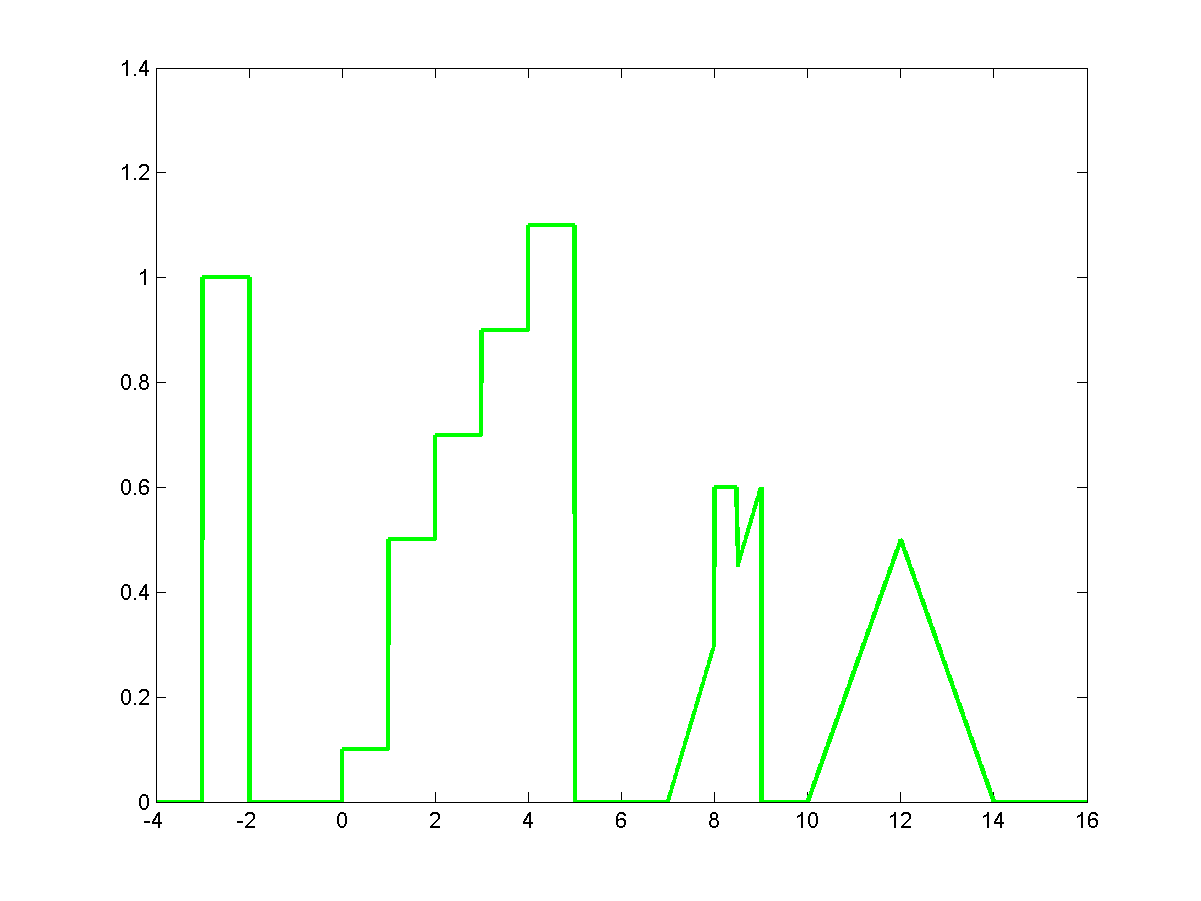
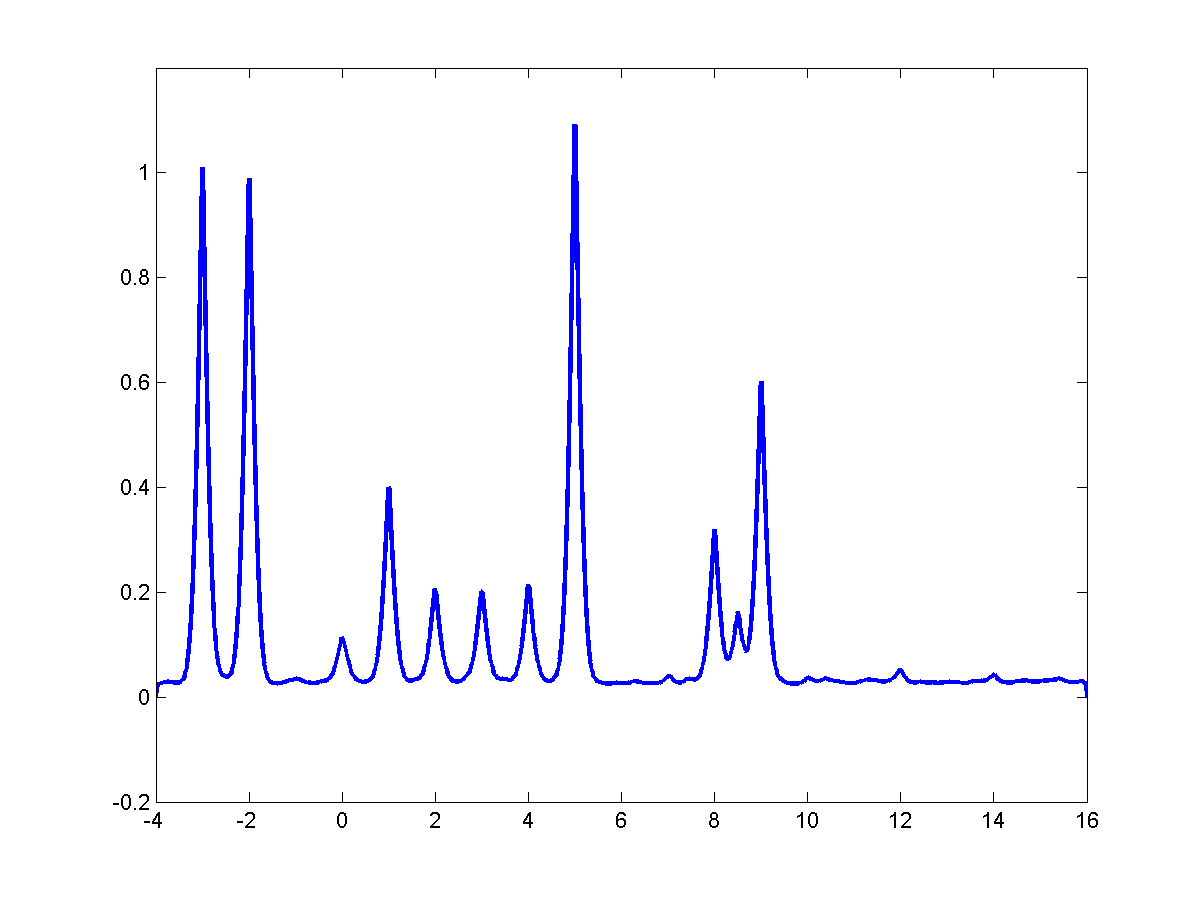
- i) 1d signal with different edge types
-
(a)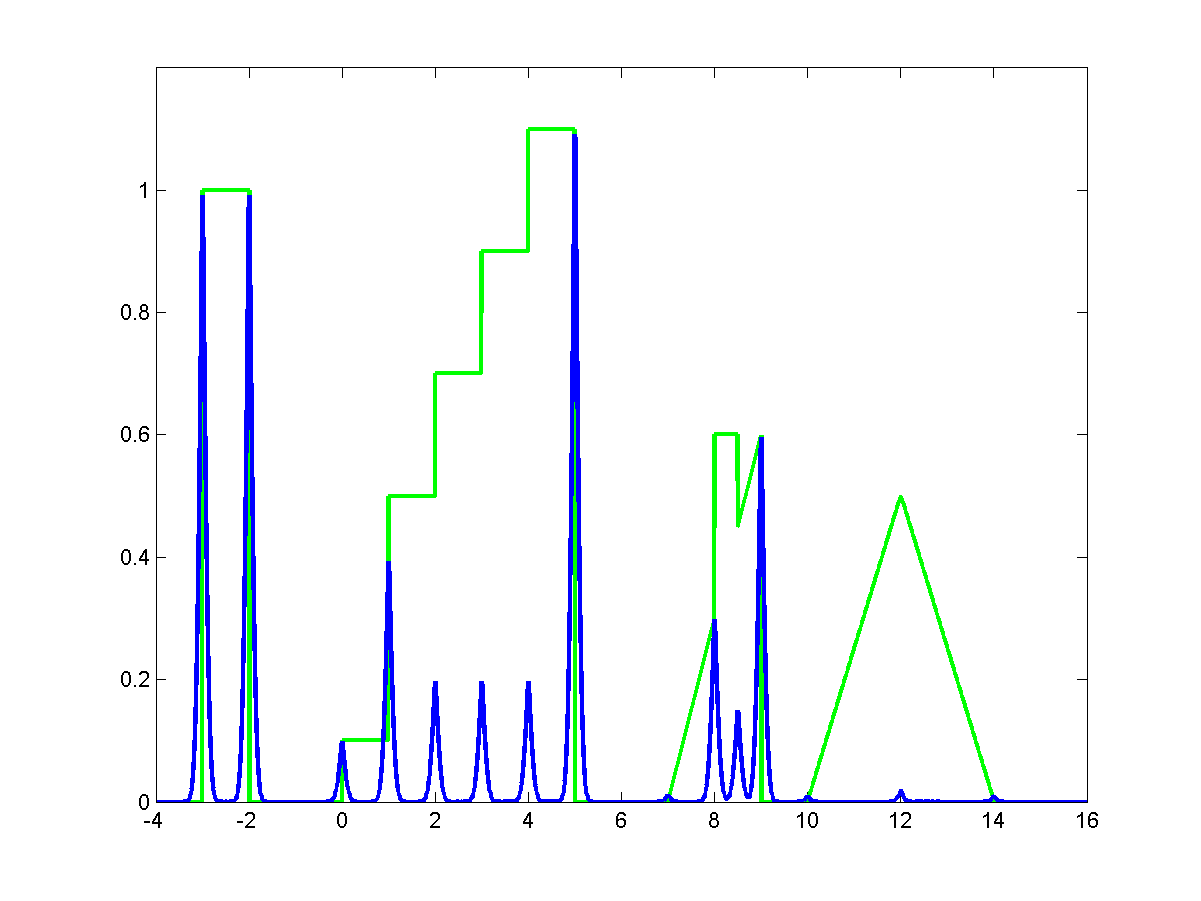
(b) -
(c) -
- (a) Input signal with various edge types.
- (b) Edge map displayed superimposed to the input signal.
-
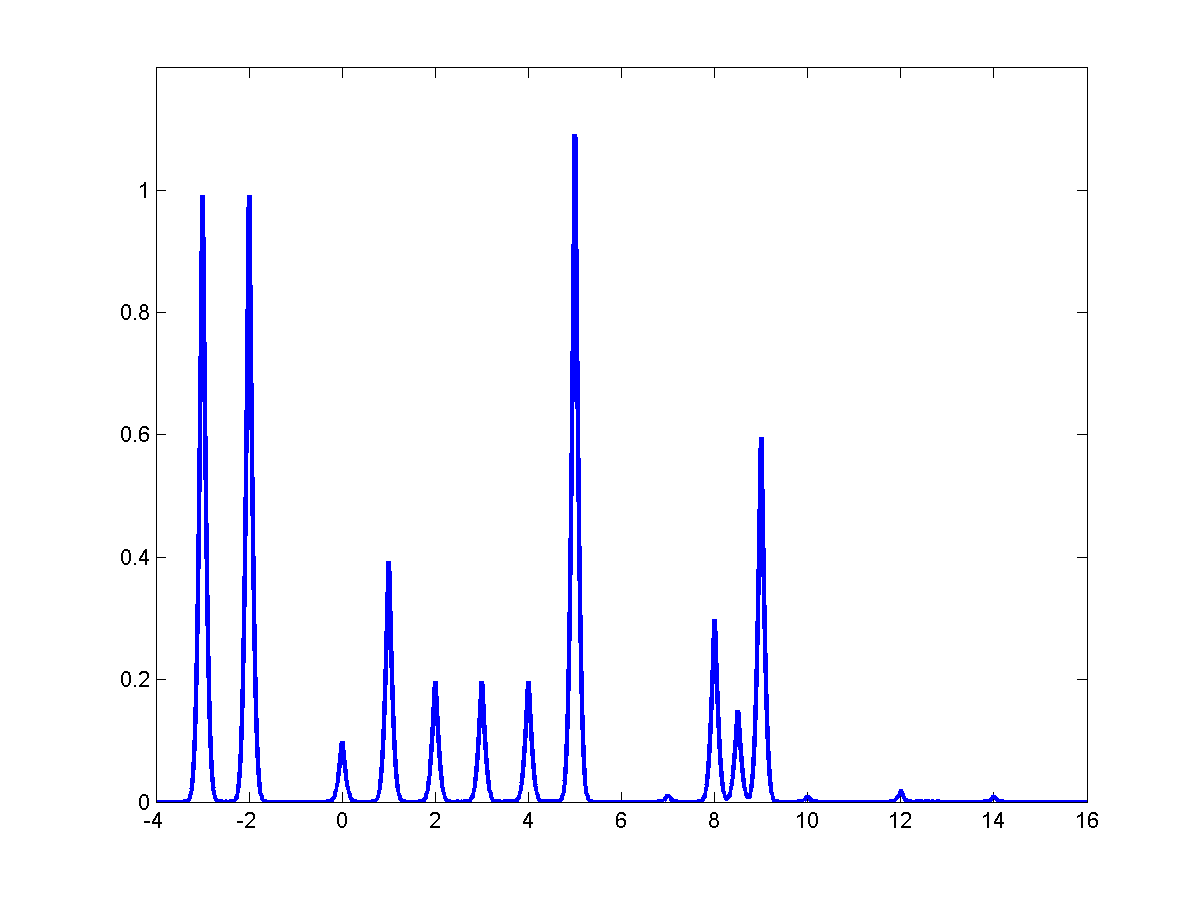
(c) Edge map corresponding to l=0.1 and
it =104.

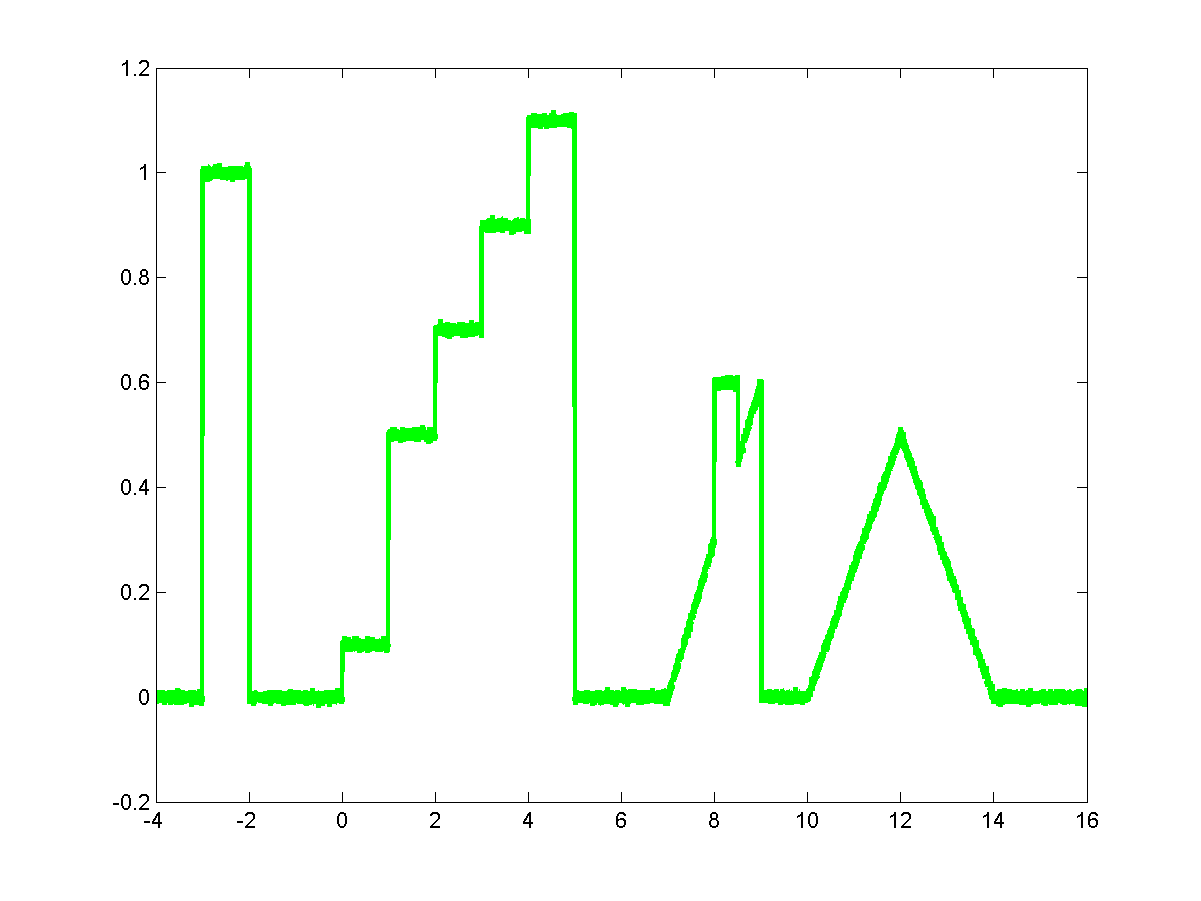
- ii) 1d signal with different edge types and with Gaussian noise
-
(a)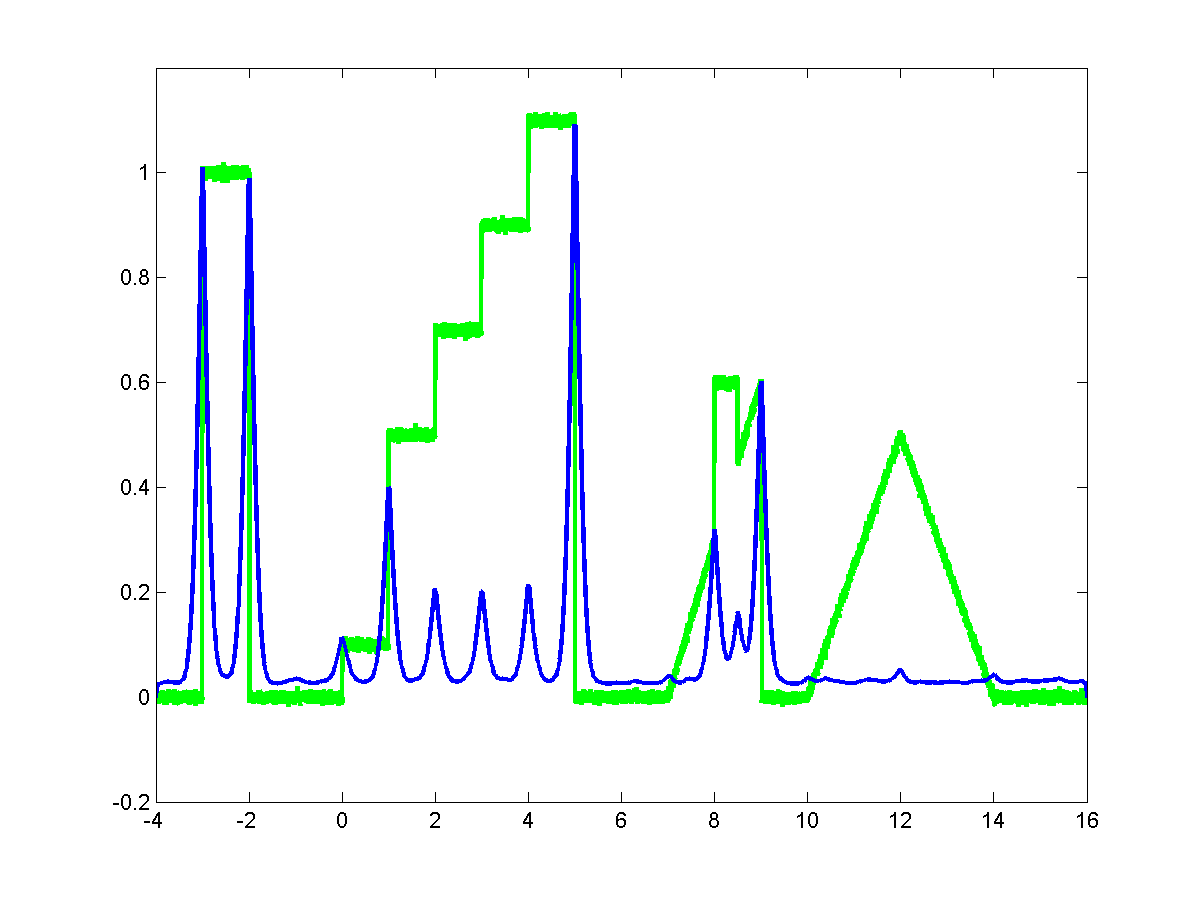
(b) -
(c) -
- (a) Input signal with various edge types and with Gaussian noise.
- (b) Edge map displayed superimposed to the input signal.
-
(c) Edge map corresponding to l=10-8 and
it =2.5∙104.
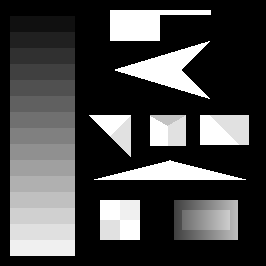
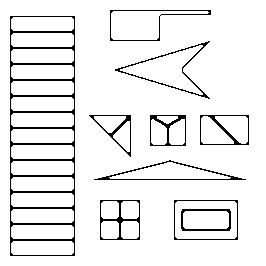
- iii) SUSAN test image
-
(a)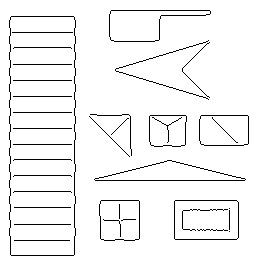
(b) -
(c)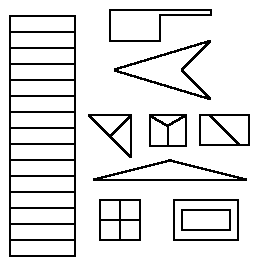
(d) -
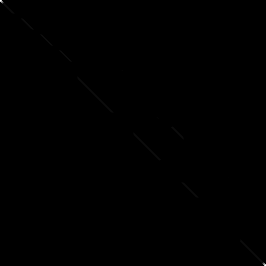
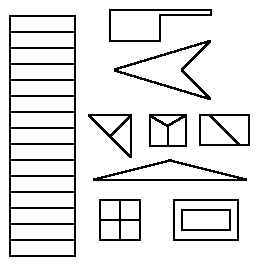
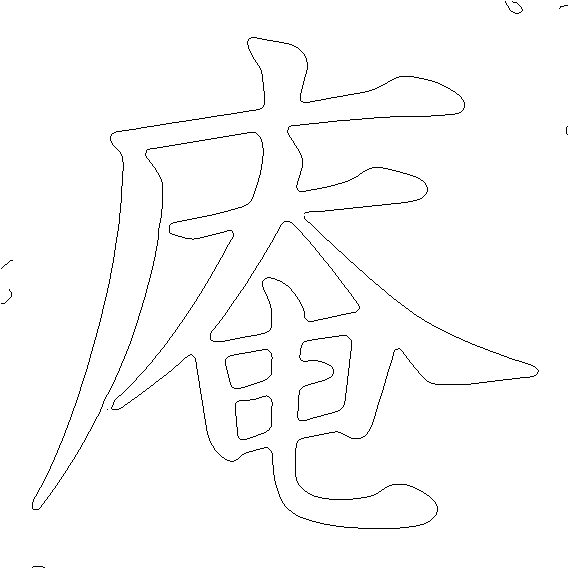
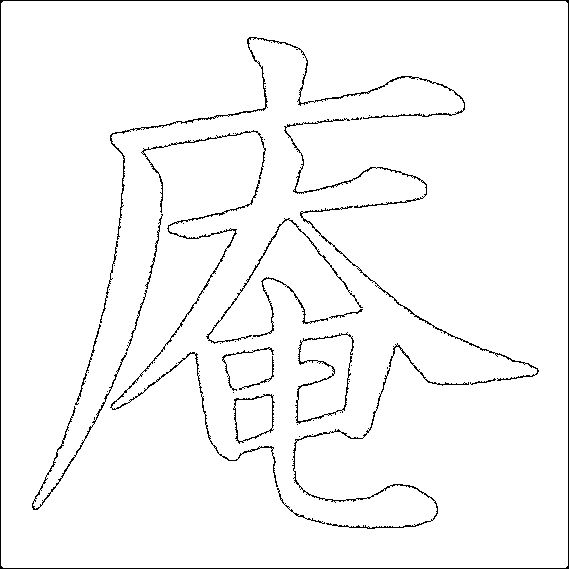
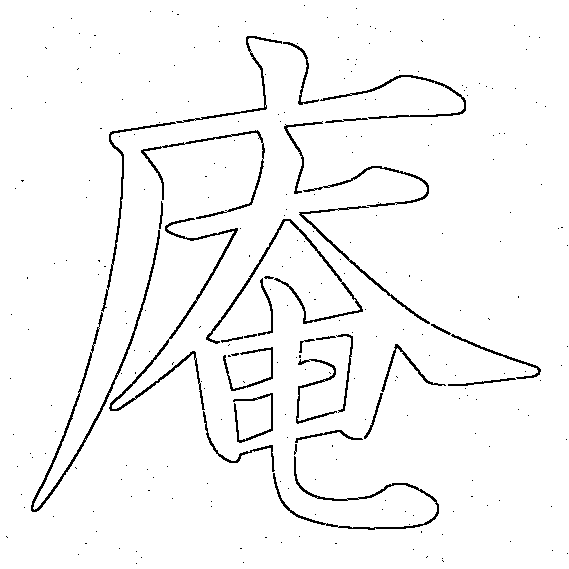
- (a) SUSAN test image used in the paper 'SUSAN - A new approach to low level image processing' by Smith S.M. and Brady J.M. in International J. Computer Vision 23 (1997) 45-78.
- (b) Canny edge detection applied to the SUSAN Test image.
- (c) SUSAN edge detection applied to the SUSAN Test image with parameter t=10.
-
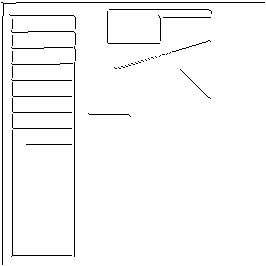
(d) Our edge detector applied to the SUSAN Test image using l=0.1,
it =1 and thres =1.
- iv) SUSAN test image with an affine perturbation
-
(a)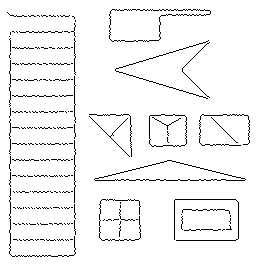
(b) -
(c)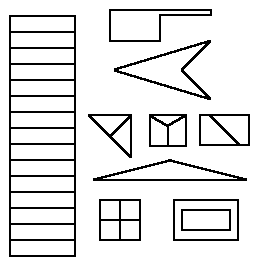
(d) -
- (a) SUSAN test image with the addition of the affine function ƒ(i,j)=5∙(i-j).
- (b) Canny edges.
- (c) SUSAN edges with parameter t=10.
-
(d) Our edges for l=0.1,
it =1 and thres =1.
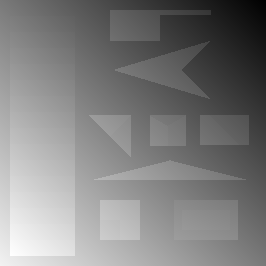
- v) SUSAN test image with a quadratic perturbation
-

(a)
(b)
-
(c)
(d)
-
- (a) SUSAN test image with the addition of the quadratic function ƒ(i,j)=(j-255)2-(i-255)2.
- (b) Canny edges.
- (c) SUSAN edges with parameter t=10.
-
(d) Our edges for l=0.1,
it =1 and thres =7.
- vi) Test image with Gaussian noise
-

(a)
(b)
-
(c)
(d)
-
- (a) Test image with the addition of Gaussian noise.
- (b) Canny edges with s=3.
- (c) The edges displayed in this picture have been obtained by applying twice the SUSAN algorithm. When applied the first time, the SUSAN algorithm filters the Gaussian noise and returns a binary image with sligthly perturbed edges. By applying again the SUSAN algorithm on the filtered image, one is then able to extract the edges of the background picture.
-
(d) Our edges for l=0.001,
it =1 and thres =90.
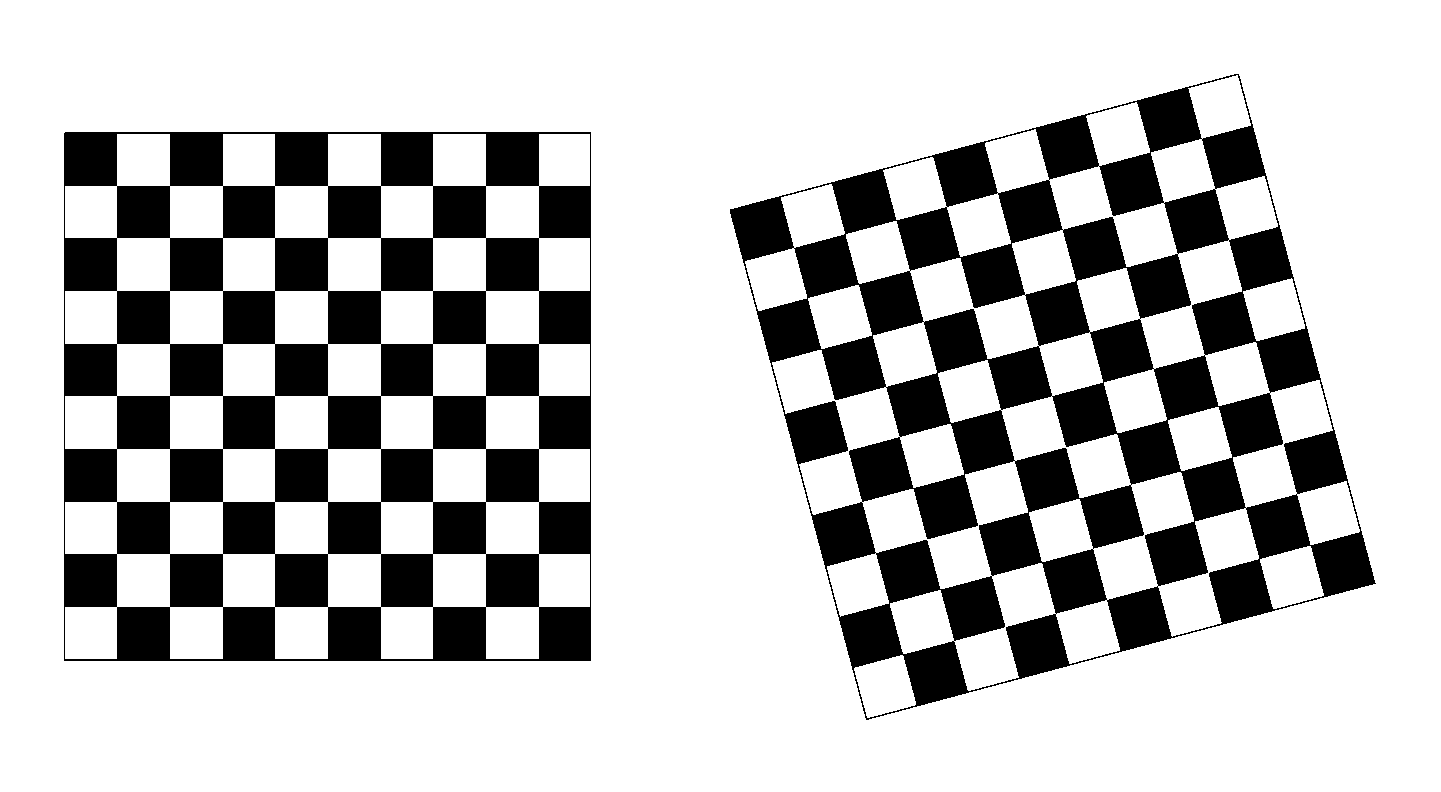
- vii) Chessboard test image
-
(a)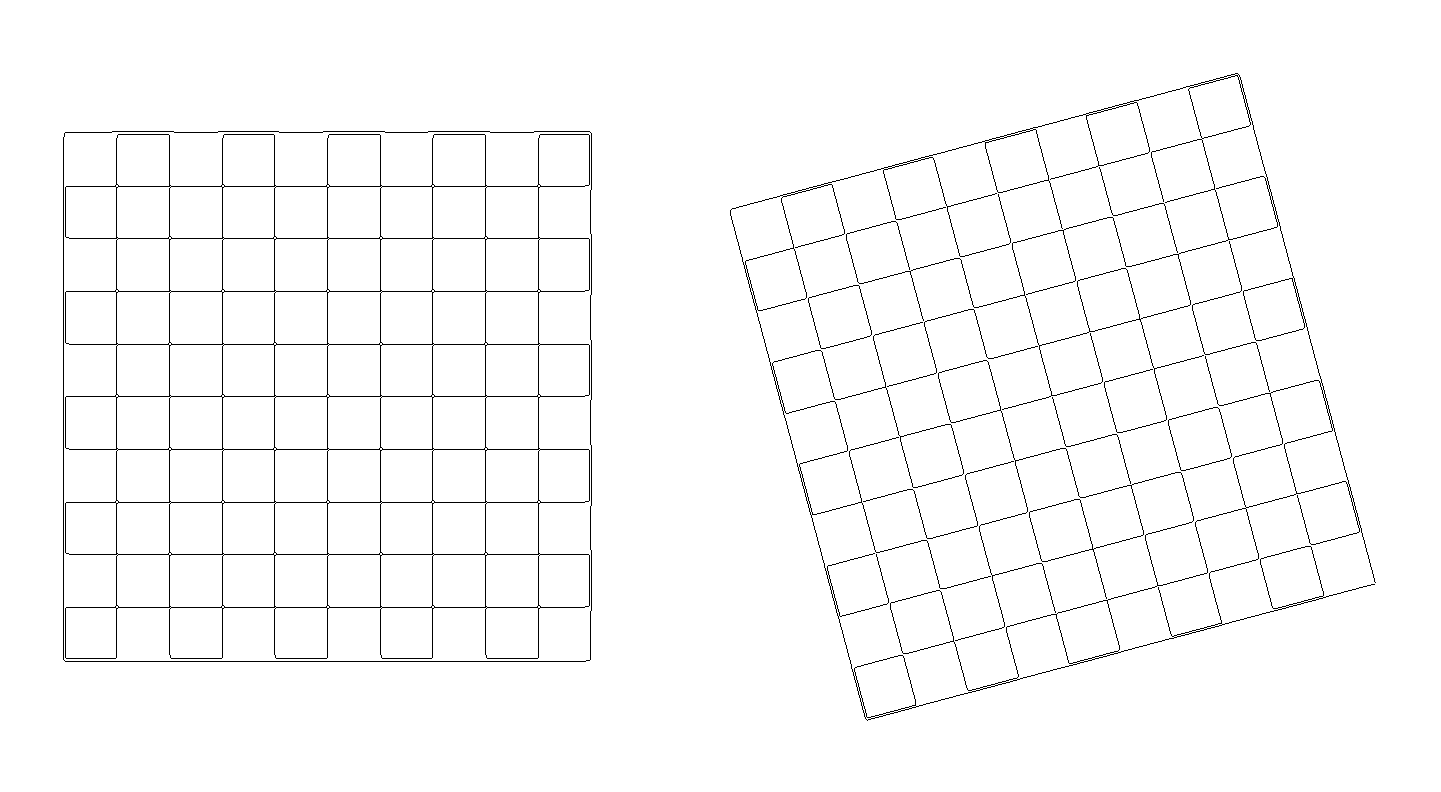
(b)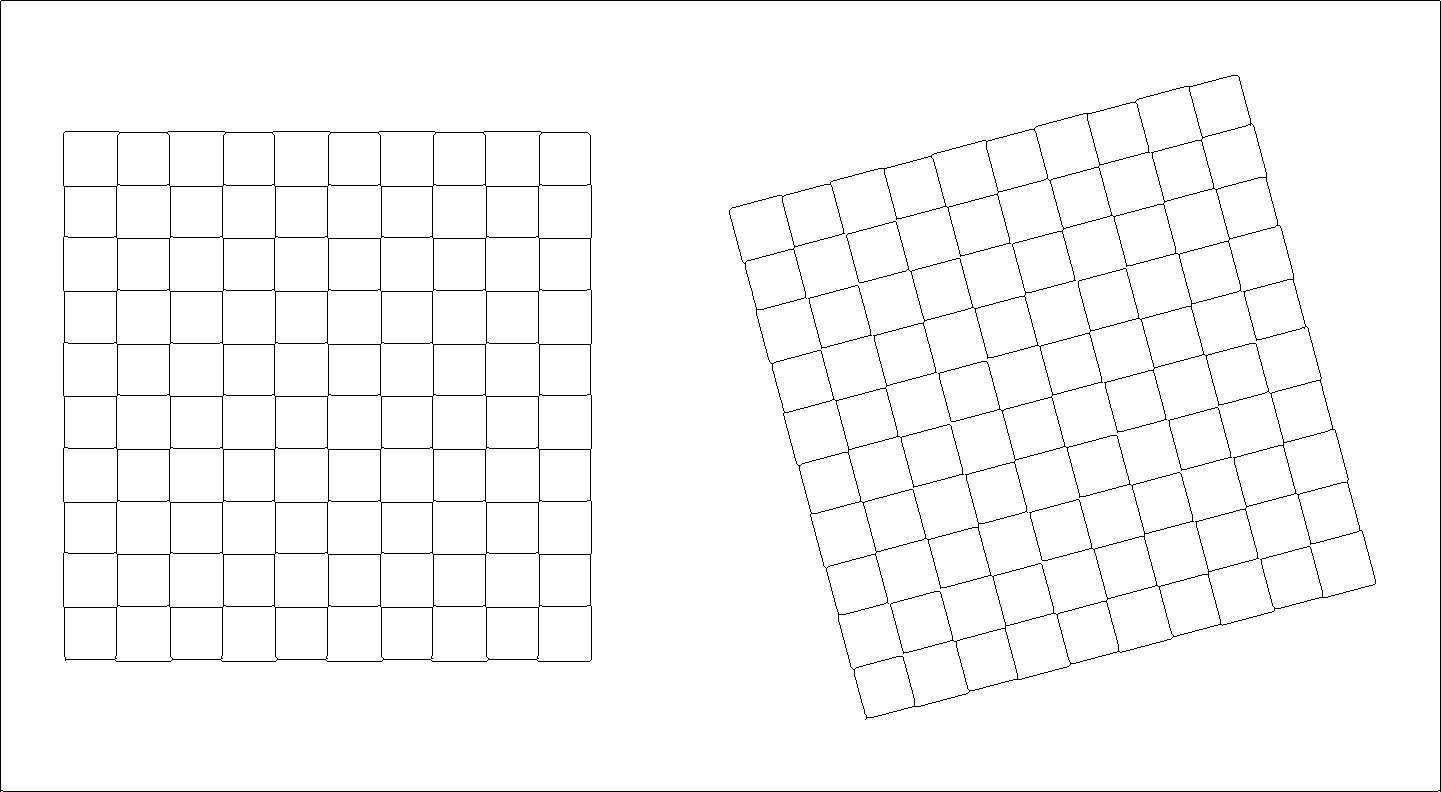
(c)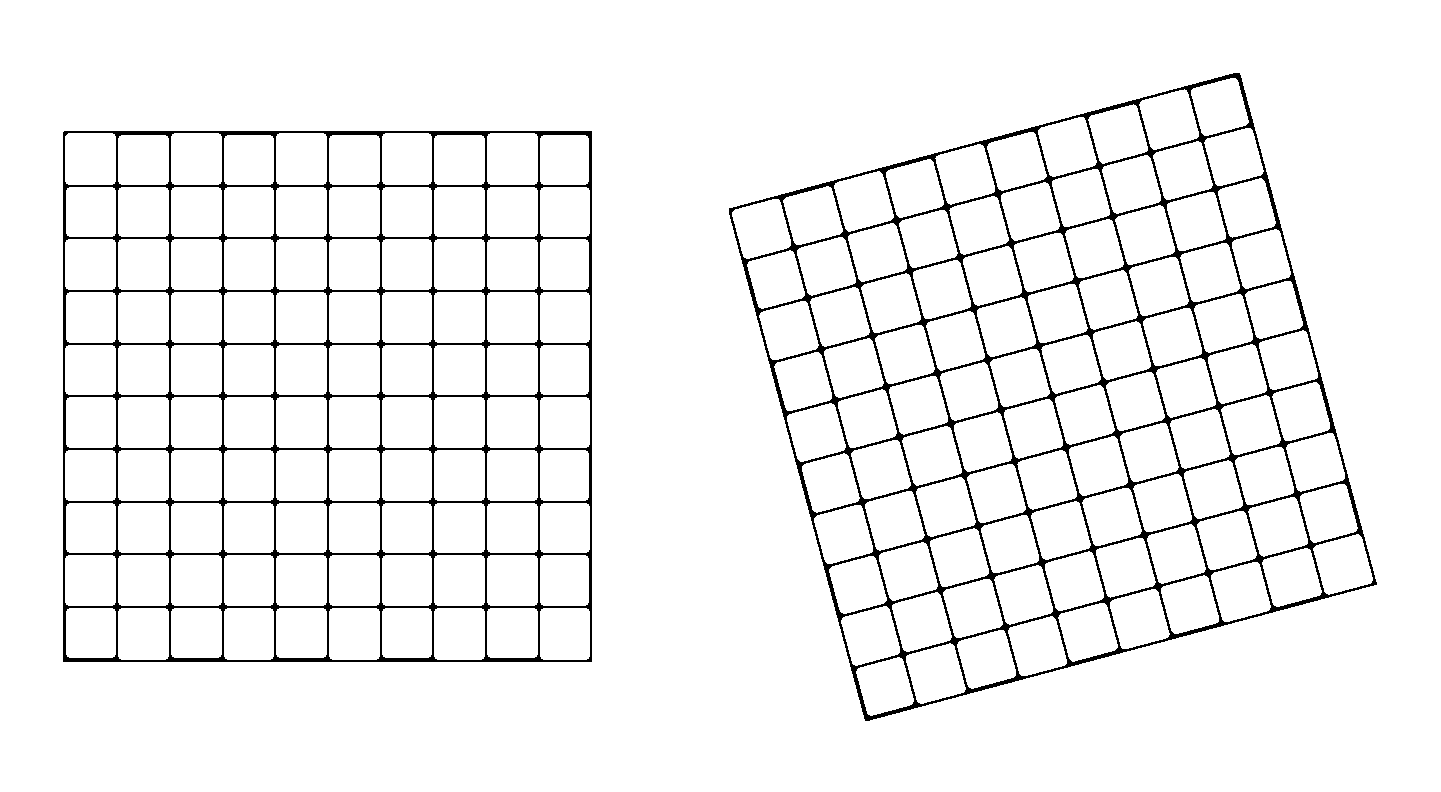
(d) -
- (a) Chessboard test image.
- (b) Canny edges.
- (c) SUSAN edge detector.
-
(d) Our edges for l=0.1,
it =10 and thres =190.
Home | Profile | Applications |
Terms of Service | Contact Us
© 2011 KEA All Rights Reserved