-
Impulse noise
-
Salt-and-pepper noise is a type of impulse noise where the original value of the pixels is lost and is taken equal to the extrems smin and
smax of the dynamic range of the pixel values of an image.
For an 8-bit gray scale image, for instance, smin=0 and
smax=255.
These pixels are referred to as corrupted or noisy pixels whose origin can be due to, for instance,
by malfunctioning pixels in camera sensors, faulty memory locations in hardware or transmissions in a noise chanel.
The corrupted pixels will not carry any true information and therefore, in devising a tool that restores or filters such
noise, information must flow from the neighboring noise-free pixels.
We have developed a transformation that is very well suitable for restoration of highly noise-density corrupted images. In the experiments shown below, the restored image is compared with those obtained: by applying the adaptive median filter as described in the paper
'Adaptive median filters: New algorithms and results' by H. Hwang and R.A. Haddad in IEEE Trans. Image Proces. 4 (1995) 499-502, and by applying the variational method described in the paper 'Salt-and-Pepper noise removal by median-type noise detectors and detail-preserving regularization' by R. Chan, Chung-Wa Ho, M. Nikolova in IEEE Trans. on Image Process. 14 (2005) 1479-1485. The comparison is both quantitative in terms of the so called Peak-to-Signal-Noise-Ratio (PSNR) and qualitative by comparing scan lines across the image.
The PSNR index is related to the reciprocal of the l2 norm of the error between the noise-free and the filtered image. In general, let L denote the noise-free image, and L‘ the filtered image or the image corrupted by salt-and-pepper noise with density d. If L and L‘ are both 8-bit gray scale, the PSNR index is then defined by the equation
PSNR=10Log((255)2(nm)/||L-L‘||2)
where Log is the logarithm in base 10 and m and n denote the size of the image L.
- i) 'Lena' corrupted by salt-and-pepper noise with density d=0.95
-

(a)
(b)
(c)

(d)
(e)

(f)

(g)

(h)
(i)

(j)

(k)
(m)
-
(a) Original 'Lena' image with size 512×512.
-
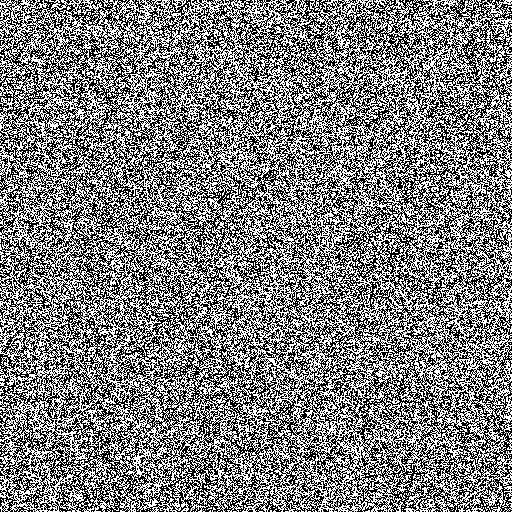
(b) 'Lena' corrupted by salt-and-peppr noise with density d=0.95.
This means that only 512×512×0.05(= 13107) pixels, out of 262144 pixels, will carry true information. PSNR=5.63
-
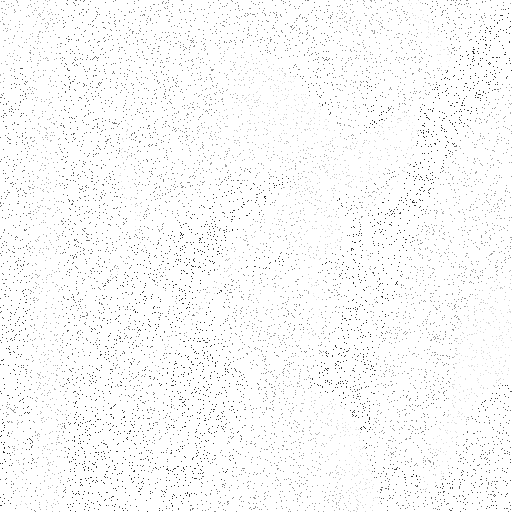
(c) Image of the true pixel values on white background corresponding to noise-pixels.
(d) 'Lena' filtered with the adaptive median filter with window size 25×25. PSNR=16.41 .
-
(e) 'Lena' filtered with the variational method. Parameter α used for the regularized function: α =100. PSNR=24.03.
-
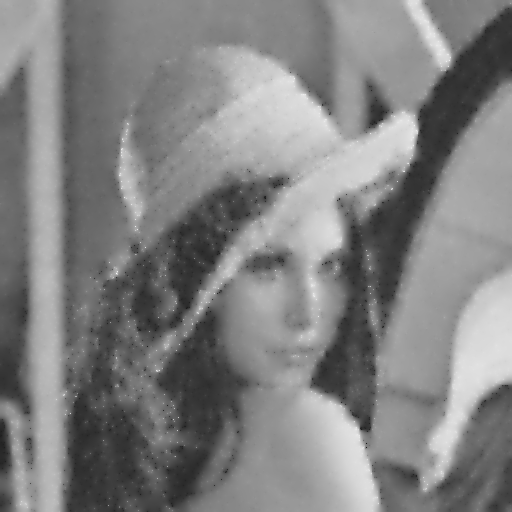
(f) 'Lena' filtered with our method. Values used for the transformation: l1=2,
it1=1000, l2=1.5,
it2=5. PSNR=24.60.
-
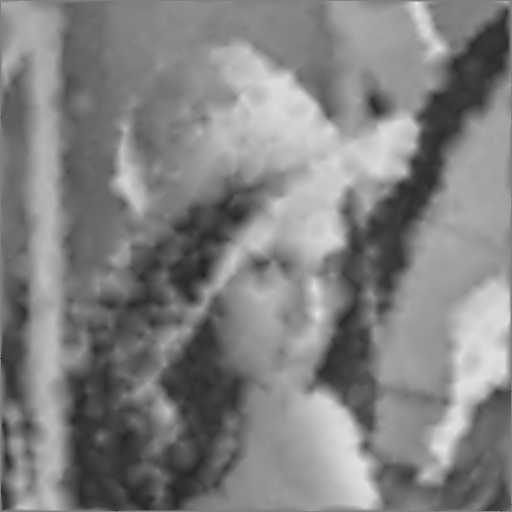
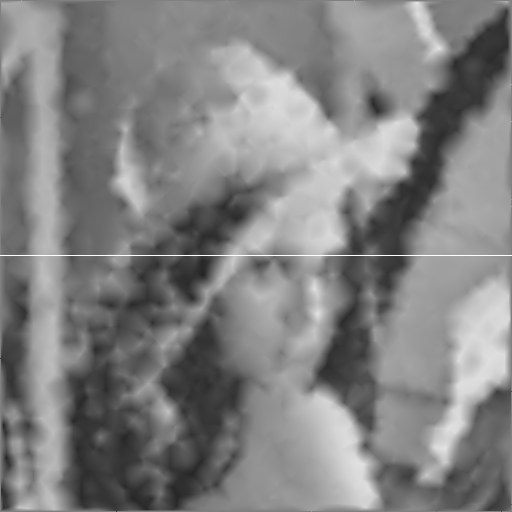
(g) Noise-free 'Lena' with marked scanline across row number 256.
-
(h) Filtered 'Lena' with marked scanline across row number 256.
-
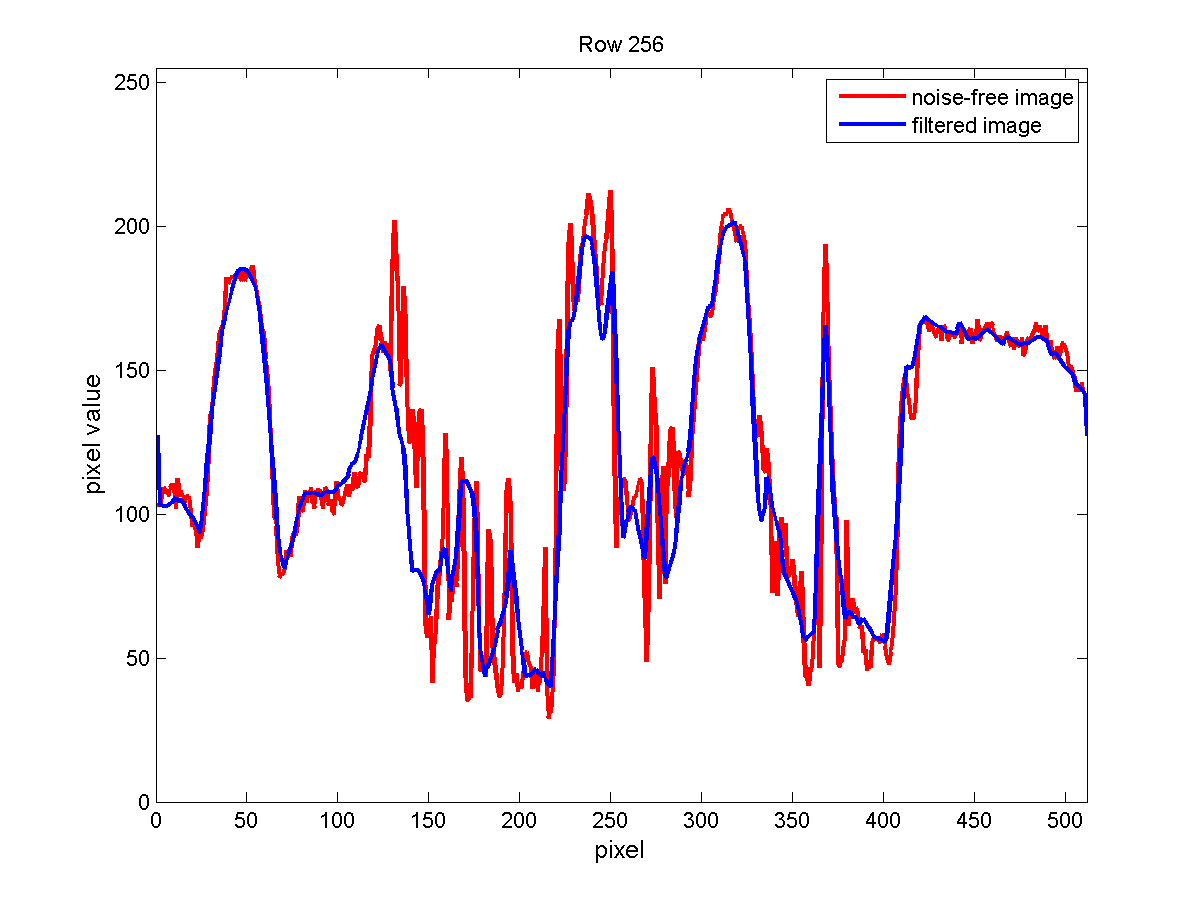
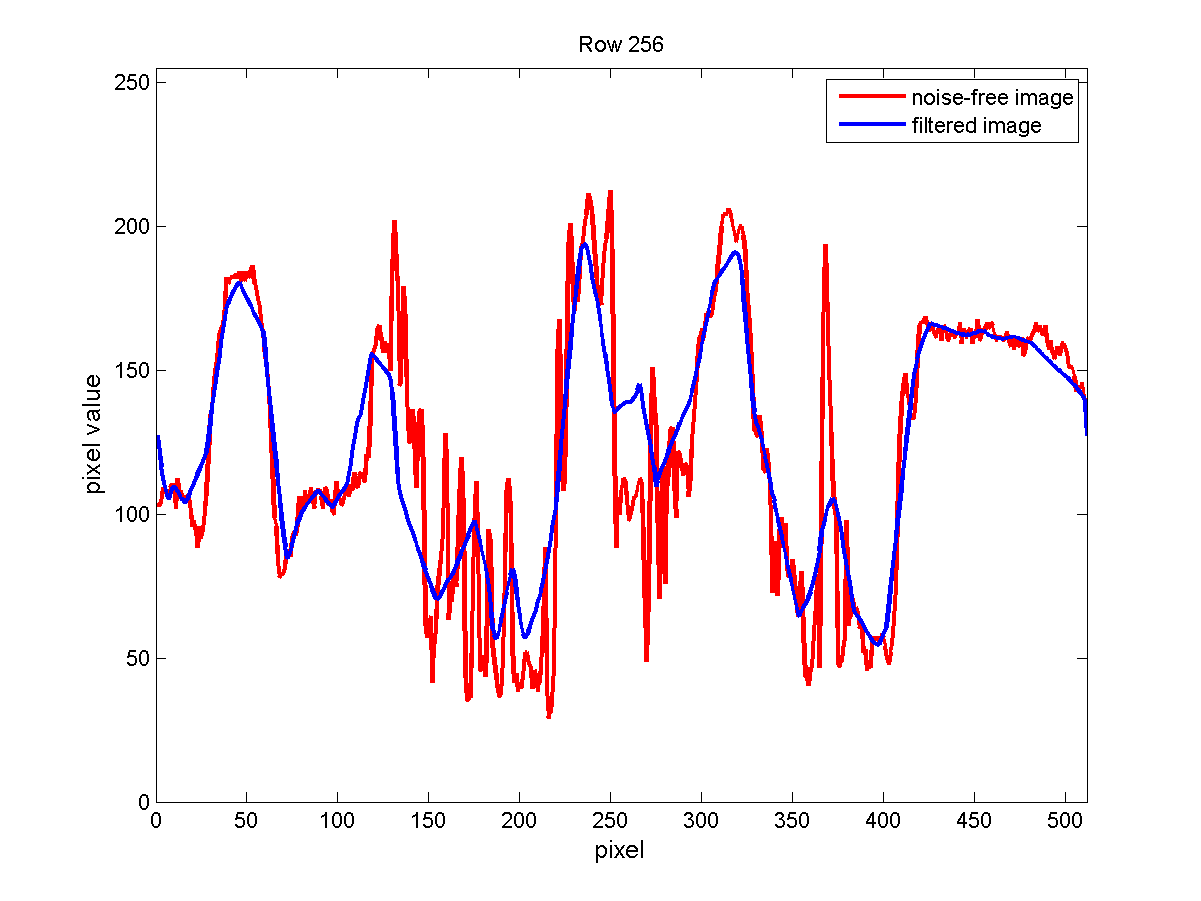
(i) Diagram of the pixel values of the noise-free 'Lena' and our filtered 'Lena' across the scanline shown in Figure (g).
-
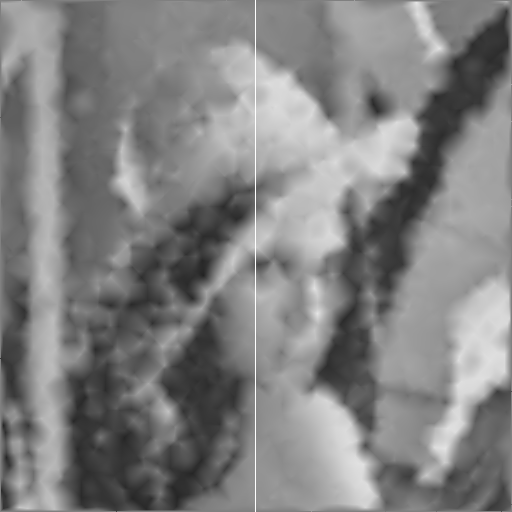
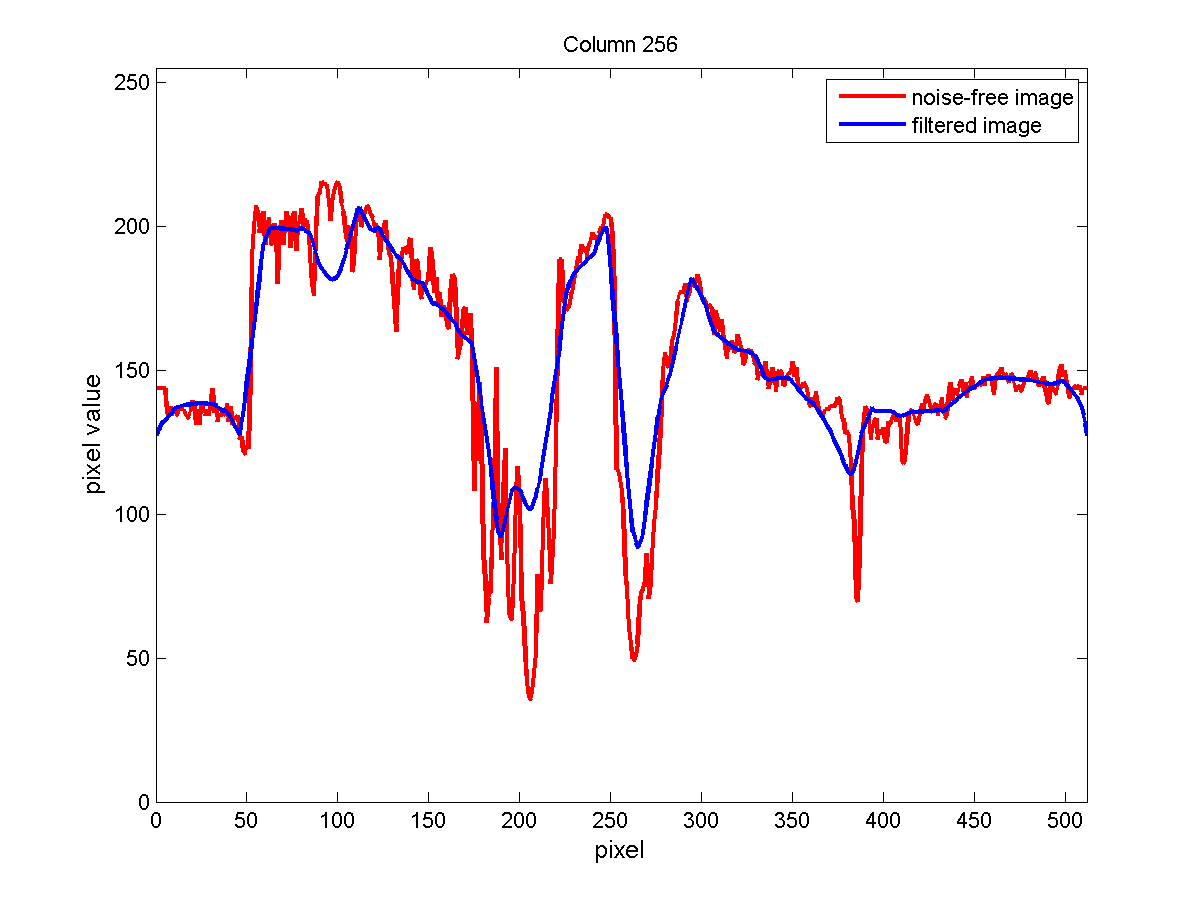
(j) Noise-free 'Lena' with marked scanline across column number 256.
-
(h) Filtered 'Lena' with marked scanline across column number 256.
-
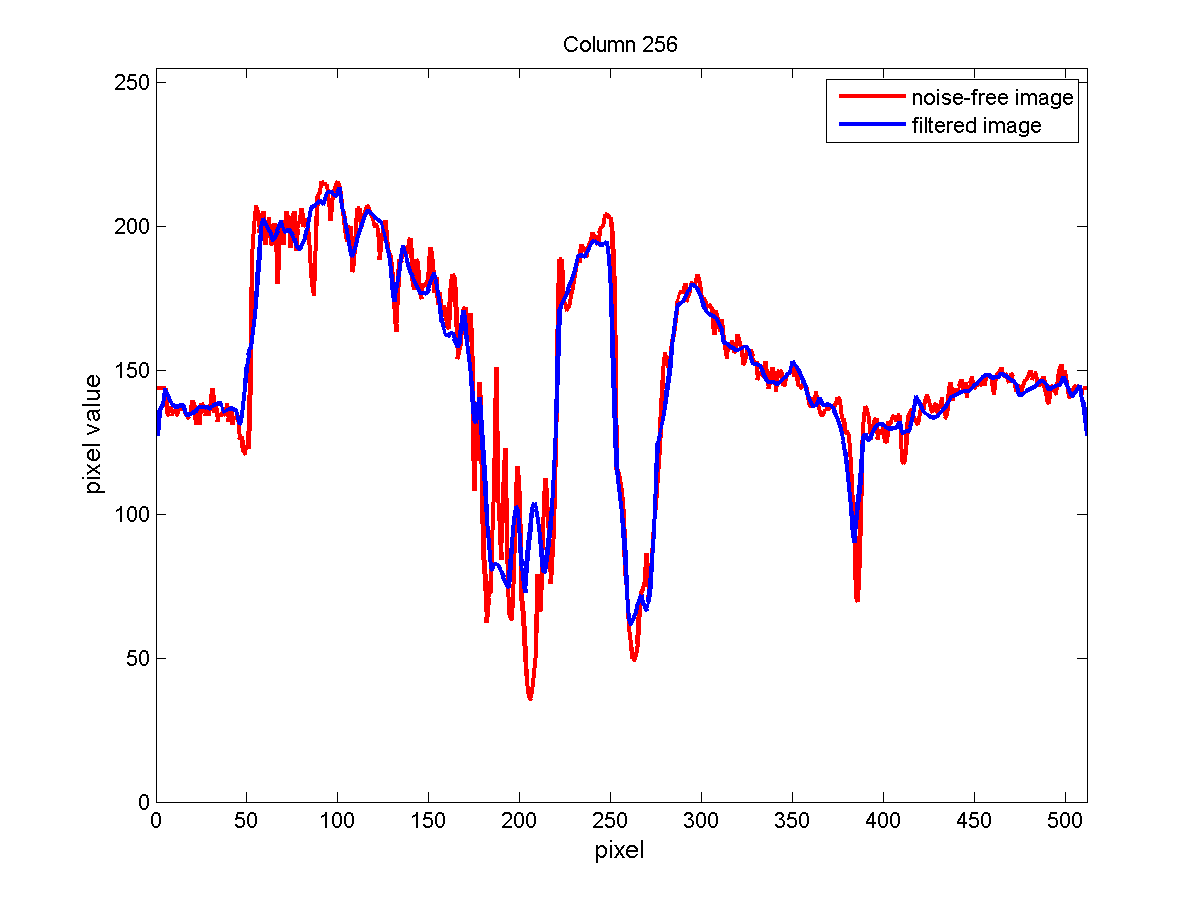
(m) Diagram of the pixel values of the noise-free 'Lena' and our filtered 'Lena' across the scan line shown in Figure (g).

ii) 'Lena' corrupted by salt-and-pepper noise with density d=0.99
-
(a)
(b)
(c)
(d)

(e)
(f)

(g)
(h)
(i)

(j)
(k)
(m)
-
(a) Original 'Lena' image with size 512×512.
-
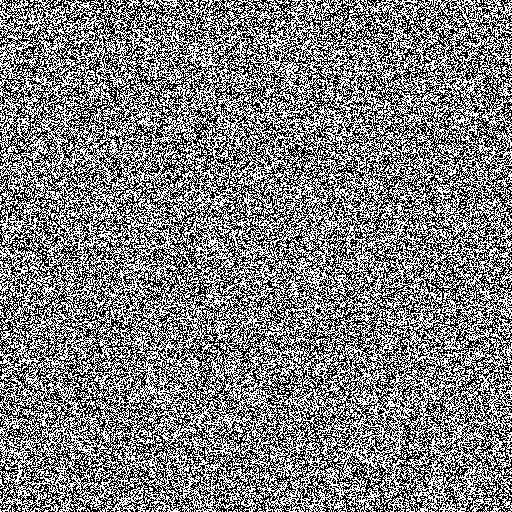
(b) 'Lena' corrupted by salt-and-peppr noise with density d=0.99.
This means that only 512×512×0.01(= 2621) pixels, out of 262144 pixels, will carry true information. PSNR=5.45
-
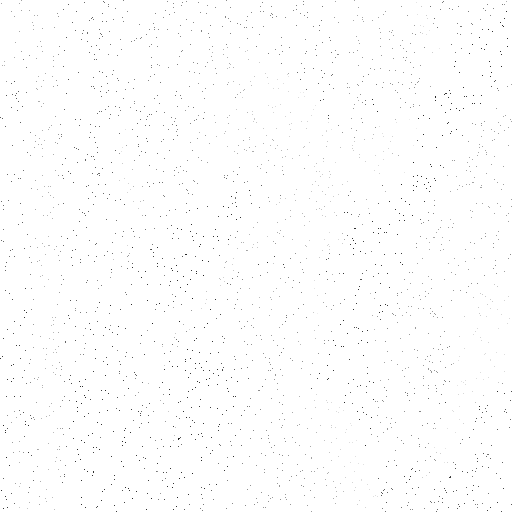
(c) Image of the true pixel values on white background corresponding to noise-pixels.
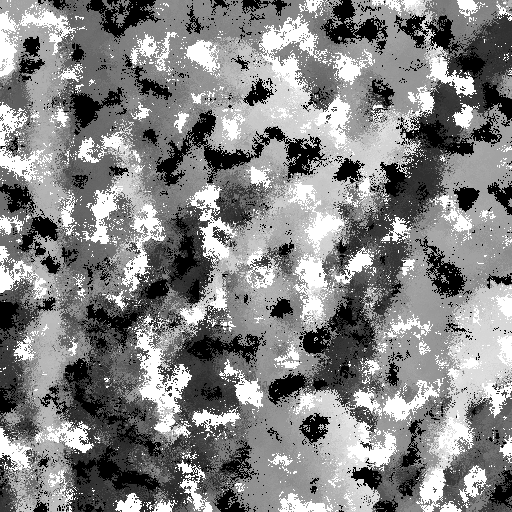
(d) 'Lena' filtered with the adaptive median filter with window size 33×33. PSNR=10.39.
-
(e) 'Lena' filtered with the variational method. Parameter α used for the regularized function: α =100. PSNR=20.09.
-
(f) 'Lena' filtered with our method. Values used for the transformation: l1=0.5,
it1=800, l2=0.1,
it2=5. PSNR=21.26.
-
(g) 'Lena' with marked scanline across row number 256.
-
(h) Diagram of the pixel values of the noise-free 'Lena' and our filtered 'Lena' across the scanline shown in Figure (g).
-
(i) 'Lena' with marked scanline across column number 256.
-
(j) Diagram of the pixel values of the noise-free 'Lena' and our filtered 'Lena' across the scanline shown in Figure (g).
